主题报告
报告题目:月球探测机器人研究初探
报告人: 高峰
单位:上海交通大学

报告摘要:
外星探测器依赖于探测装备完成探测任务,国际上常采用着陆器和巡视器设计外星探测器。外星探测器重量直接影响探测成本,如果能把着陆器和巡视器融为一体设计出可在月面反复着陆和行走的飞跃器,则能明显降低外星探测器的重量,大幅度减少外星探测的成本。本报告将介绍“飞跃行走外星探测机器人的设计与控制实验”,包括月面低空飞跃着陆行走四足和六足飞跃探测器的并联式主动腿式机构方案、在多种复杂地形上主动缓冲着陆和行走的适应能力、高功率密度力控驱动单元、飞跃探测器结构优化、主被动复合缓冲控制,飞跃器着陆过程的缓冲和身体稳定性控制。该飞跃探测器具有多次缓冲、自主移动、可收拢展开、着陆姿态调整、复杂地形适应等多种功能。
报告人简介:
高峰,博士,上海交通大学讲席教授、国家973计划首席科学家、国家杰出青年基金获得者;主要研究方向为“并联与步行机器人的设计与控制”,获国家自然科学二等奖、美国机械工程师学会ASME达芬奇设计与发明奖、何梁何利科学与技术进步奖。
报告题目:理论运动学奠定了变胞机构与可重构机构与可重构机器人基础
报告人: 戴建生
单位:英国伦敦大学国王学院/天津大学

报告摘要:
本大会主旨报告介绍高等运动学基本理论及其贯通有限旋量与李群和李代数关系的前沿研究,以此开辟了变胞机构子领域与可重构机构与可重构机器人大领域。高等运动学研究中的内在理论为各种形式的可重构机构和可重构机器人开发奠定了基础,从而引出了二十余年创新的变胞机构,可重构机器人及其进化的并联机器人。随着运动系统顺序的改变,该机构改变了其运动性并呈现出不同的拓扑。
该演主旨报告从哲学角度进一步探讨了机器人科学与艺术之间的缱绻,并介绍了折纸机器人,艺术机器人,变胞机器人,康复机器人和可重构机器人数十年来发展。这种缠绵可以通过数学工具来提升,尤其是采用旋量理论的高等运动学,以及通过有限旋量与李群和李代数的关系。随着旋量系统顺序的改变,机器人机构改变了其活动度与自由度,并针对不同任务产生出不同拓扑,以适应不同环境与不同需求。
可重构机构和可重构机器人的广泛应用在组装,包装,食品工业,家用机器人,步行机器人,折纸机器人,康复机器人和医疗机器人等方面得到展示,从而在未来几十年中实现“未来机器人”。
报告人简介:
戴建生教授为国际理论运动学与可重构机构学权威专家,为ASME 两个终身成就奖获得者,ASME 和 IEEE 双 Fellow,在国际机构学与机器人学中享有盛誉。现为英国伦敦大学国王学院机构学与机器人学讲席教授。
2015年获得美国机械工程师学会(ASME)“机构学与机器人学终身成就奖” ,2020年获得美国机械工程师学会(ASME)“机械设计终身成就奖” 。该奖为 ASME 最高奖项,也为机械设计领域最高奖。2020年获奖词:为建立可重构机构领域和变胞机构子领域做出了开拓性与奠基性贡献;并通过研究、应用、教学和服务对机械设计产生了持久性影响,弥合了通用但昂贵的机器人与高效但不灵活的机器之间的鸿沟。
戴建生教授长期从事理论运动学、机构学与机器人学的基础理论与应用研究,在国内外发表学术论文600余篇,其中国际期刊论文400余篇,出版专著10余部,被引用 12000余次,h-指数55,i10-指数220。戴建生教授是美国电气电子工程师学会(IEEE)Fellow,美国机械工程师学会(ASME)Fellow,英国机械工程院(IMechE)Fellow,英国皇家艺术学会(RSA) Fellow。被授予 IEEE Fellow 时的贡献词为:贡献于世界机器人的可重构机构与变胞机构。 任 IFToMM(世界机构与机器联合会)英国区主席,曾任 ASME 英国与爱尔兰区主席,任多个国际学术期刊主编、副主编,并在多个学术组织任职。除了2015年与2020年的终身成就奖外,获得了多项国内外学术奖励与荣誉,多项国际期刊最佳论文奖,包括 ‘2018年 Crossley Award’ ,等5项最佳期刊论文奖,‘2019年 AT Yang Memorial Award’ 理论运动学奖等9项最佳会议论文奖,伦敦国王学院 2010年度最佳博士生指导教师全校首名奖(3000人一名),2012年 ASME杰出服务奖,中国机构学学会2012年“学术创新奖”和“国际学术交流奖”,等11项个人奖。已培养博士40余名,其中10余位在中国、英国、美国、意大利、澳洲、墨西哥等一流大学任教,10余位在世界各地含中国、意大利、英国、新加坡与墨西哥创办机器人高新科技公司。
论文列表:

报告题目:柔顺机构拓扑优化研究进展与展望
报告人: 张宪民
单位:华南理工大学

报告摘要:
对柔顺机构拓扑优化的研究背景、研究现状进行了分析,在此基础上,介绍了采用拓扑优化方法寻找新型柔顺铰链、设计分布柔顺机构、多输入多输出柔顺机构、柔顺胞元结构等的研究进展。最后,对柔顺机构拓扑优化的研究进行了展望。
报告人简介:
张宪民,现任华南理工大学机械与汽车工程学院院长、博士生导师,1998年晋升教授,国家杰出青年科学基金获得者(2008)、新世纪百千万人才工程国家级人选(2006)、广东省特支计划杰出人才(2019)、国务院政府津贴专家(2007)、丁颖科技奖获得者(2007)、全国模范教师(2001)。兼任国际机构与机器科学联合会(IFToMM)执委(2020- )、机械工程学会机器人分会副主任委员(2017- )、中国智能学会智能制造专业委员会副主任委员(2011- )等;任美国机械工程师学会(ASME)会刊Journal of Mechanism and Robotics副主编(2013-2016);机械工程学报、振动工程学报、中国机械工程、机器人等刊物编委。研究领域涉及机器人学、机构运动学与动力学、机器视觉、精密制造装备等。发表SCI、EI索引论文400余篇,其中在国际重要期刊上发表SCI索引论文200余篇,论文被引用5700余次;出版英文专著1部,主编出版《机械工程概论》、《机器人技术及其应用》等教材4部;授权国内外各类专利100余件。部分成果获广东省科技发明一等奖1次,科技进步一等奖2次,广东省专利金奖1次、中国优秀专利奖2次。
报告题目:机构学与机器人现状及发展趋势
报告人: 刘辛军
单位:清华大学

报告摘要:略
报告人简介:
刘辛军,清华大学长聘教授、博士生导师,国家杰出青年科学基金获得者,教育部“长江学者”特聘教授,国家“万人计划”领军人才,德国“洪堡”学者。现任精密超精密制造装备及控制北京市重点实验室主任、清华大学(机械系)-西门子先进工业机器人联合研究中心主任。研究方向是机器人与机构学、先进与智能制造装备。发表论文160余篇,2014-2019连续六年入选爱思唯尔中国高被引学者榜单,授权发明专利70余件,获得国家自然科学二等奖、中国机械工业科学技术奖(发明类)一等奖、教育部自然科学奖二等奖、中国好设计奖银奖、第三届中国科协优秀科技论文奖、《机械工程学报》首届高影响力论文奖、全国机器人专利创新创业大赛特等奖等。
报告题目:精度检测与评定的运动几何学原理
报告人: 王德伦
单位:大连理工大学

报告摘要:略
报告人简介:
王德伦,博士, 教授,博士生导师。教育部机械基础教学指导委员会副主任,全国机械原理教学研究会理事长,全国机构学会副主任委员,ASME“Journal of Mechanisms and Robotics”前副主编;出版学术专著《机构运动微分几何学分析与综合》中文版(机械工业出版社,2015)和《KINEMATIC DIFFERENTIAL GEOMETRY AND SADDLE SYNTHESIS OF LINKAGES》英文版(Wiley Press,2015),主编教材《机械原理》(机械工业出版社,2011)和《机械设计》(机械工业出版社,2014)。在《Mechanism and Machine Theory》、《ASME Journal of Mechanical Design》,《ASME Journal of Mechanism and Robotics》和《中国科学》、《机械工程学报》等国际和国内学术期刊上发表代表性学术论文200余篇。承担国家自然基金、国家863、国家科技支撑计划和国家科技重大专项等项目20余项,长期从事机构学基础理论及其在风电、机床等工程领域应用研究工作。
报告题目:基于机构运动的大变形超材料
报告人: 陈焱
单位:天津大学

报告摘要:
超材料是一种新型人造结构型复合材料,在不违背基本的物理学规律的前提下,通过多种结构上的设计来突破自然规律的限制,从而获得天然材料所不具备的超常物理性能,经历了从二维电磁超表面到三维热学、声学、机械等多领域超材料的发展历程,是一个跨学科、高度交叉的前沿研究领域。目前的研究前沿聚焦在大变形超材料,通过大尺度改变其内部结构拓扑分布以获得多种功能的变化适应。针对超材料/超结构构建中的可编程性和可调控性两大重点难题,提出了基于机构运动的大变形超材料的概念,并初步探索了机构学在大变形超材料设计中扮演的重要角色和带来的创新效果。为机构学的理论与应用发展提供新的方向,为超材料的设计与技术突破提供新的途径。
报告人简介:
陈焱,天津大学机械工程学院讲席教授, 英国牛津大学博士,“机构理论与装备设计” 教育部重点实验室常务副主任,英国机械工程师学会会士(FIMechE)。
研究方向以机构理论为核心,在机构学、力学和结构工程等多学科的交叉领域,重点研究可展结构的设计方法、过约束机构的构建与运动学特性分析、折纸结构的机构学模型与超材料设计方法等基础理论,及其在大型航天展开结构、新型轻质工程结构、医疗折展结构等方面的工程应用,形成了较为完整的机构理论与结构设计交叉融合的科研体系。现为国际机构学与机器科学联合会(IFToMM)中国委员会副主席;获得国家自然科学基金杰出青年科学基金。
报告题目:从基金的视角探讨“柔性机构学与机器人”的发展
报告人: 于靖军
单位:北京航空航天大学机器人研究所

报告摘要:
柔性(或柔顺)机构与柔性机器人是当前本领域全球范围内的一个研究热点方向。报告结合课题组及国内同行的科研成果,从国家自然科学基金的视角探30年来“柔性机构学与机器人”的研究进展,包括柔性机构学基础理论、柔性机器人关键技术等。在此基础上,展望一下未来5-10年本领域的热点方向。
报告人简介:
于靖军,男,1974年2月生,博士,北京航空航天大学教授。主要研究方向为柔性机构学与机器人、精密机械设计等。主持国家自然科学基金项目6项,出版学术著作6部,发表论文100余篇,授权中国发明专利30余件。
报告题目:人机耦合系统结构设计与运动控制
报告人: 王启宁
单位:北京大学
报告摘要:
穿戴式机器人在医疗康复和特种环境中的应用得到了越来越多的关注。由于该类机器人与人体间的强耦合关系,其刚性驱动和结构往往对运动产生约束。随着仿生结构设计和运动控制的不断发展,新型驱动方式在穿戴式机器人中得到了初步应用。本报告介绍了相关尝试和主要挑战,并从几个典型应用角度介绍了课题组的研究进展。
报告人简介:
王启宁,北京大学工学院研究员、博士生导师。现任北京大学工学院副院长、北京大学机器人研究中心副主任、北京大学康复工程研究中心主任、北京市智能康复工程技术研究中心(省部级工程中心)主任。主要从事智能机器人研究,在动态行走机理、穿戴式机器人、运动意图识别、肢体神经运动康复等领域取得了一系列研究成果,在国际期刊和会议上发表论文180余篇,取得中国发明专利授权28项、美国发明专利授权2项,部分成果已实现产业化。作为项目负责人主持国家自然科学基金“共融机器人”重大研究计划重点支持项目、国家重点研发计划“智能机器人”重点专项项目、国防科技创新特区重点项目等国家和地方科研项目20余项。担任IEEE RAM、IEEE/ASME TMECH、IEEE TMRB等5个国际期刊编委,发起成立IEEE-RAS Technical Committee on Wearable Robotics。是科技部中青年科技创新领军人才、国防科工局国防科技创新团队带头人、国家万人计划青年拔尖人才、国家自然科学基金优秀青年科学基金获得者。获得首届“熊有伦智湖优秀青年学者奖”。
报告人: 谢福贵
单位:清华大学

报告摘要:
在航空航天、能源、船舶等重大技术领域装备核心部件制造中,如:重型燃气轮机中的大型结构件加工,以及大型设备异地维修等,对便携式或可移动式高性能多轴联动数控装备需求迫切。为实现此类高性能制造装备的创新设计以及整机系统研发,本报告以五轴并联加工机器人为研究对象,围绕其机构创新设计、运动学优化设计等问题展开,面向高效高质量切削加工应用,探讨加工机器人惯量匹配、轨迹规划、精度保证等关键技术,介绍机器人装备关键功能部件及整机系统研制、S试件切削与质量检测等。
报告人简介:
谢福贵,博士、清华大学副教授、博导,国家优秀青年科学基金获得者、德国洪堡学者,主要研究方向是机器人与机构学。主持国家自然科学基金、科技部重点研发计划等国家级科研项目或课题7项,出版学术专著1部,发表SCI论文40余篇,获中国发明专利授权30余项。获中国机械工业科学技术奖(发明类)一等奖、教育部自然科学二等奖、好设计奖银奖、上银优秀机械博士论文奖优秀奖,中国机械工程学会优秀论文奖、F5000中国精品科技期刊顶尖学术论文奖、第三届中国科协优秀科技论文奖、《机械工程学报》首届高影响力论文奖、国际会议唯一最佳论文奖等。任中国自动化学会机器人专业委员会委员、中国自动化学会共融机器人专业委员会委员。
报告人: 董为
单位:哈尔滨工业大学

报告摘要:
精密机械的驱动与传动一直是装备制造业的基础,与传统刚性零件和运动副构成的传动部件不同,柔顺传动利用其构件的弹性变形,通过对变形的精确控制实现精密传动,能够使系统在几十至几百微米级的运动范围内达到纳米级的定位精度。由于柔顺关节受到屈服强度的客观限制,其弹性变形量极其微小,所以导致基于此类集中柔度的柔顺机构仅能提供微米级的运动范围。设计出大行程柔顺机构,能从根本上解决在柔顺机构中存在的“大行程”与“高精度”之间的矛盾,则成为了新技术挑战。报告将介绍课题组在分布柔度、超弹性材料、放大机构、宏微驱动等几个方向上的研究尝试。
报告人简介:
董为,工学博士,教授/博士生导师,任职于哈尔滨工业大学机器人技术与系统国家重点实验室。2007-2009年,美国康涅狄格大学机械工程系博士后;2009-2010年,法国国家科学研究院博士后;2010年起,任职于哈尔滨工业大学机器人技术与系统国家重点实验室。主要研究方向包括柔顺机构、穿戴式机电系统等。获黑龙江省技术奖发明类一等奖1项(2016年)、黑龙江省科学技术奖自然类二等奖1项(2016年)、黑龙江省科学技术奖发明类二等奖1项(2012年)。目前,担任国际期刊Precision Engineering副编辑、中国工程院院刊Frontiers of Information Technology & Electronic Engineering通讯编委、IET Cyber-Systems and Robotics副编辑。
报告人: 丁亮
单位:哈尔滨工业大学

报告摘要:
地面力学作为地面车辆研究的基础理论已经历了60余年的发展历程。近年来,与地面存在复杂作用力学行为的多种机器人被研发出来,例如星球探测车、星球采样作业机器人、野外足式机器人。因此,人们针对机器人地面力学开展了大量研究以突破传统接触力学的瓶颈。报告内容涉及机器人轮地作用力学、足地作用力学、作业力学等,重点介绍融合多物理效应(滑转沉陷、轮刺效应、载荷效应和尺寸效应)的滑转力学、纵向滑移力学、转向力学等内容,包括实验规律、理论模型、参数辨识、应用方法,探讨其在月球车、火星车、野外重载六足装备的机构设计、仿真、控制等方面的应用。面向航天等领域发展需求,展望地面动力学及与人工智能的结合等未来发展方向。
报告人简介:
丁亮,哈尔滨工业大学宇航空间机构及控制研究中心长聘教授、博导,国家优青基金获得者。面向星球探测车、野外六足机器人等开展系统设计、地面力学、数字孪生、智能控制方面的研究,主持国家重点研发计划课题、973项目专题、火星探测国家重大专项课题等30余项。在IJRR、IEEE TCyber/TRO/TIE等刊物发表学术论文180余篇,SCI论文100余篇,最高IF为11.079,IF>9的论文10篇,封面论文3篇。授权/受理发明专利89项。成果应用于“玉兔”系列月球车、“天问一号”火星车、野外重载六足装备等。获得国家技术发明二等奖、ISTVS Sohne-Hata- Jurecka Award、熊有伦智湖优秀青年学者奖等。

分会场2论文汇报
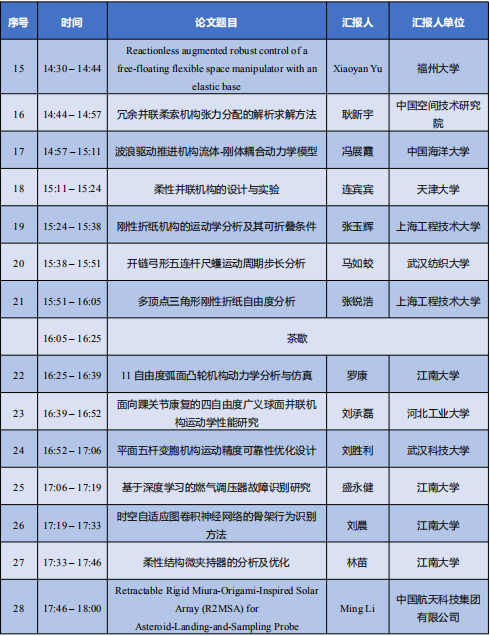
分会场3论文汇报

分会场4论文汇报